在拓扑任务中,您可以通过查看单个任务节点的执行状态以快速发现和定位拓扑中的执行问题。您还可以通过对拓扑进行人工干预以控制拓扑任务的执行。
任务节点状态
任务节点的生命周期如下: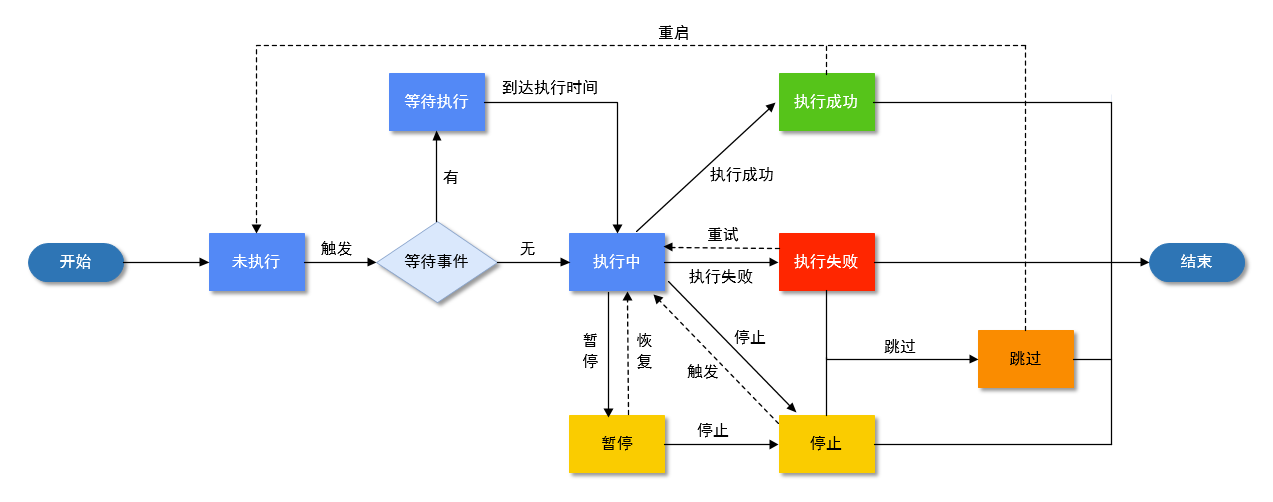 在拓扑任务中,单个任务节点可能处于以下状态之一:
在拓扑任务中,单个任务节点可能处于以下状态之一:
未执行:该节点未实例化。
执行中:该节点正在执行中。
执行成功:节点执行成功。在无其它人工干预操作的情况下,后续节点将被自动触发。
执行失败:节点执行失败,所有后续节点将不被触发。整个拓扑任务执行失败。
暂停:执行中的节点在被人工暂停后处于暂停状态。暂停中的任务被恢复执行后将从任务断点继续执行。
已停止:节点被强制终止。
已跳过:某个节点执行失败或被强制终止后可被标记为跳过,以继续执行拓扑中的后续节点。
等待执行:某个节点设置了等待事件时,前置节点执行完成后,该节点会进入等待执行状态,到达延时时间后转变为执行中。
人工干预操作
您可以通过人工操作对执行中的拓扑任务进行实时干预,以改变当前的执行逻辑。例如,您可以通过对异常节点进行暂停操作,以查看问题并从断点恢复执行,或通过加锁、解锁操作对任务节点强制进行人工确认。
操作类型 | 操作对象 | 说明 | 适用任务状态 |
|---|---|---|---|
暂停 | 节点 | 适用于任务执行过程中发现任务有异常,进行优雅的暂停,问题修复后需要继续执行。对应的操作为恢复。 重要
| 执行中 |
恢复 | 节点 | 继续执行暂停中的任务。 | 暂停 |
停止 | 节点 | 强制终止任务,不需要再执行。 |
|
重试 | 节点 | 在失败的调度记录中重新执行该任务节点。 |
|
跳过 | 节点 | 跳过当前节点并驱动后续节点的执行。如果节点处于加锁状态,跳过以后必须人工解锁才会触发后续节点执行。 |
|
重置 | 节点 | 将当前任务节点重置到未执行状态,删除其后置已经实例化的节点。 |
|
重新触发 | 节点 | 重新触发该任务节点,生成新的调度记录。仅适用于简单任务或集群任务节点。 |
|
加锁 | 节点 | 加锁后的任务节点在执行完成后自动中止后续任务并等待人工确认。经人工确认并解锁后,该拓扑再继续执行后续操作。 |
|
解锁 | 节点 | 解除锁定。如果当前节点处于执行成功或跳过状态,则解锁后自动触发后续节点。 | 锁定中 |
全量暂停 | 拓扑 | 暂停当前拓扑任务中的所有执行中的集群任务节点和简单任务(包含多个步骤并且没有执行到最后一步)节点。 | 执行中 |
全量取消 | 拓扑 | 强制停止当前拓扑任务中的所有执行中或暂停中的节点。 |
|
全量恢复 | 拓扑 | 恢复处于暂停状态的拓扑任务,恢复执行暂停状态的节点,驱动已执行成功节点的后置节点。 | 暂停 |
说明
任务子流程支持暂停、取消和恢复操作,在子流程进行人工干预还会影响到父拓扑任务的执行。
该文章对您有帮助吗?