本文介绍如何使用Visual Studio Code - Alibaba Cloud Toolkit对ROS模板及资源栈实现便捷、高效的管理。
前提条件
- 下载并安装Visual Studio Code。
- 已在IntelliJ IDEA中安装和配置Cloud Toolkit,请参见在Visual Studio Code中安装和配置Cloud Toolkit。
模板管理
Alibaba Cloud Toolkit - ROS LOCAL TEMPLATES、ROS REMOTE TEMPLATES是一个用于管理阿里云资源编排产品(ROS)模板的工具,它通过一个资源配置文件(.ros.config.yml),协助您对模板文件进行管理操作。
- ROS LOCAL TEMPLATES:帮助您便捷的管理本地的ROS模板。
- ROS REMOTE TEMPLATES:帮助您便捷的管理远程账号下的ROS模板。
模板编写具备以下特点:
- 代码块功能:模板提供param和ref参数快捷创建方式。
- 代码提示:在Resources下输入资源类型中的关键字即可提示所有相关资源类型。例如:
- 输入ECS会提示所有与ECS相关的资源类型,选择您需要的资源类型。
- 在Properties下输入属性相关字母提示该资源类型的相关属性,属性名称支持模糊匹配。
- 语法校验:模板键值数据类型的校验。
说明 .ros.config.yml文件是Alibaba ROS Templates工具用于管理模板的源文件。
- 在Visual Studio Code中打开您的工程。
- 在左侧任务栏中选择EXPLORER,单击ROS LOCAL TEMPLATES右侧的+。说明 目前支持JSON和YAML两种格式创建资源编排模板。
- 编辑本地模板。在Resources参数中输入资源类型。
- AlibabaCloud ROS YAML Template示例
- AlibabaCloud ROS JSON Template示例
本地模板管理功能操作说明如下。
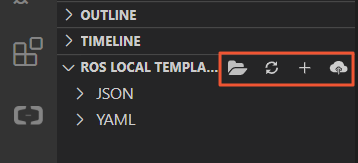
功能 描述 Open Folder 打开文件夹。 Refresh 刷新本地模板目录。 Create 创建本地模板。首次使用此插件创建模板默认会创建JSON、YAML及.ros.config.yml文件。 Upload 上传本地模板至远端服务器。 - AlibabaCloud ROS YAML Template示例
- 右键单击本地模板,可根据需求进行操作。
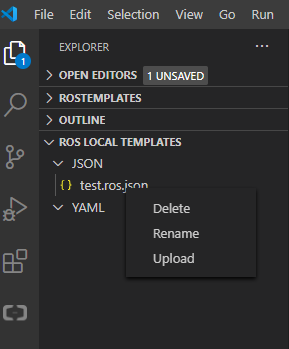
功能操作说明如下。
功能 描述 Delete 删除本地模板。 Rename 重命名模板名称。 Upload 上传本地模板。 - 编辑远端模板。鼠标悬浮至远端模板,会显示模板属性信息。
远端模板管理功能操作说明如下。
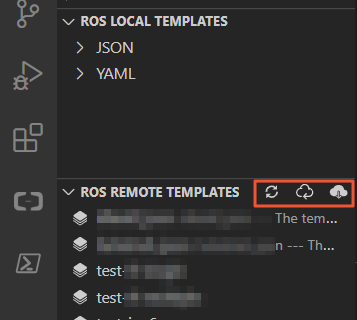
功能 描述 Refresh 刷新远端模板目录。 Update 更新远端模板。 Download 下载远端模板。 说明 单击远端模板,默认会打开一个临时只读模式文件。 - 右键单击远端模板,可根据需求进行操作。
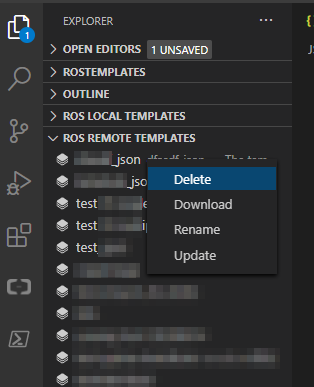
功能操作说明如下。
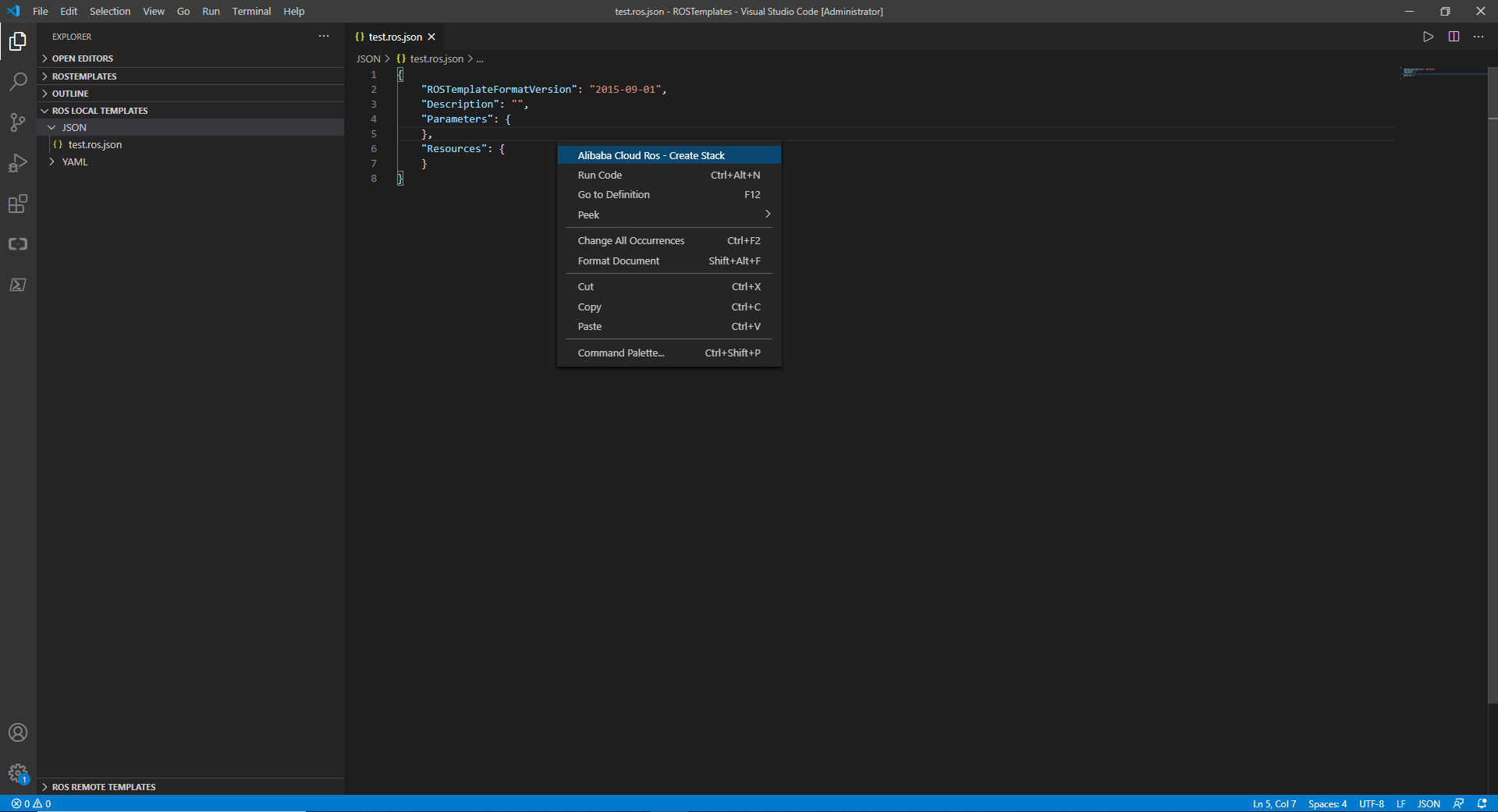
功能 描述 Delete 删除远端模板。 Download 下载远端模板。 Rename 重命名远端模板。 Update 更新远端模板。 说明 更新远端模板时,默认会打开一个远端模板对比框,显示对比远端模板修改情况,可在右侧模板中进行编辑,完成后右键单击Alibaba Cloud Ros - Update Template,可更新远端模板。 - 编辑区文件尾缀为.ros.json或者.ros.yaml时,右键单击Alibaba Cloud Ros - Create Stack,可跳转至创建资源栈。
资源栈管理
Alibaba Cloud VIEW - ROS View(Alibaba Cloud View)是一个用于管理阿里云资源编排产品(ROS)资源栈的工具,能帮助您便捷地管理远端资源栈。
- 在Visual Studio Code中打开您的工程。
- 在Visual Studio Code窗口中选择,可根据您的需求进行相关操作。
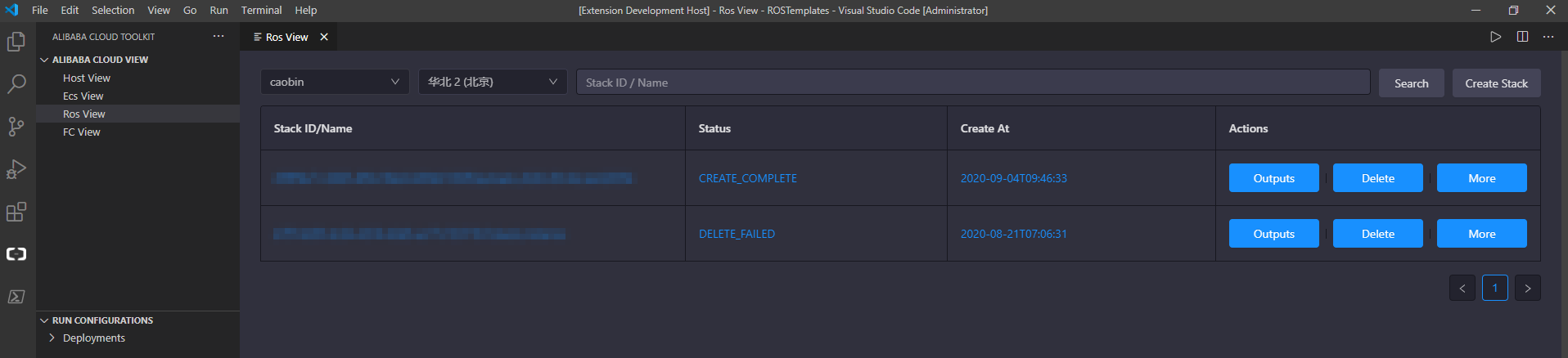
资源栈管理功能操作说明如下。
功能 描述 地域 选择地域。 Search 在当前地域下,搜索资源栈ID或资源栈名称;若未输入,则刷新当前地域资源栈列表。 Create Stack 创建资源栈 ,自动跳转至官网ROS控制台创建资源栈界面。 Stack ID/Name 单击名称,显示该资源栈属性信息。 Status 显示该资源栈当前状态。 Create at 显示该资源栈创建时间。 Outputs 显示该资源栈的输出值信息。 Delete 删除该资源栈。 More - Properties:显示该资源栈的属性信息。
- Resources:显示该资源栈内的所有资源信息。
- Parameters:显示该资源栈的参数信息。